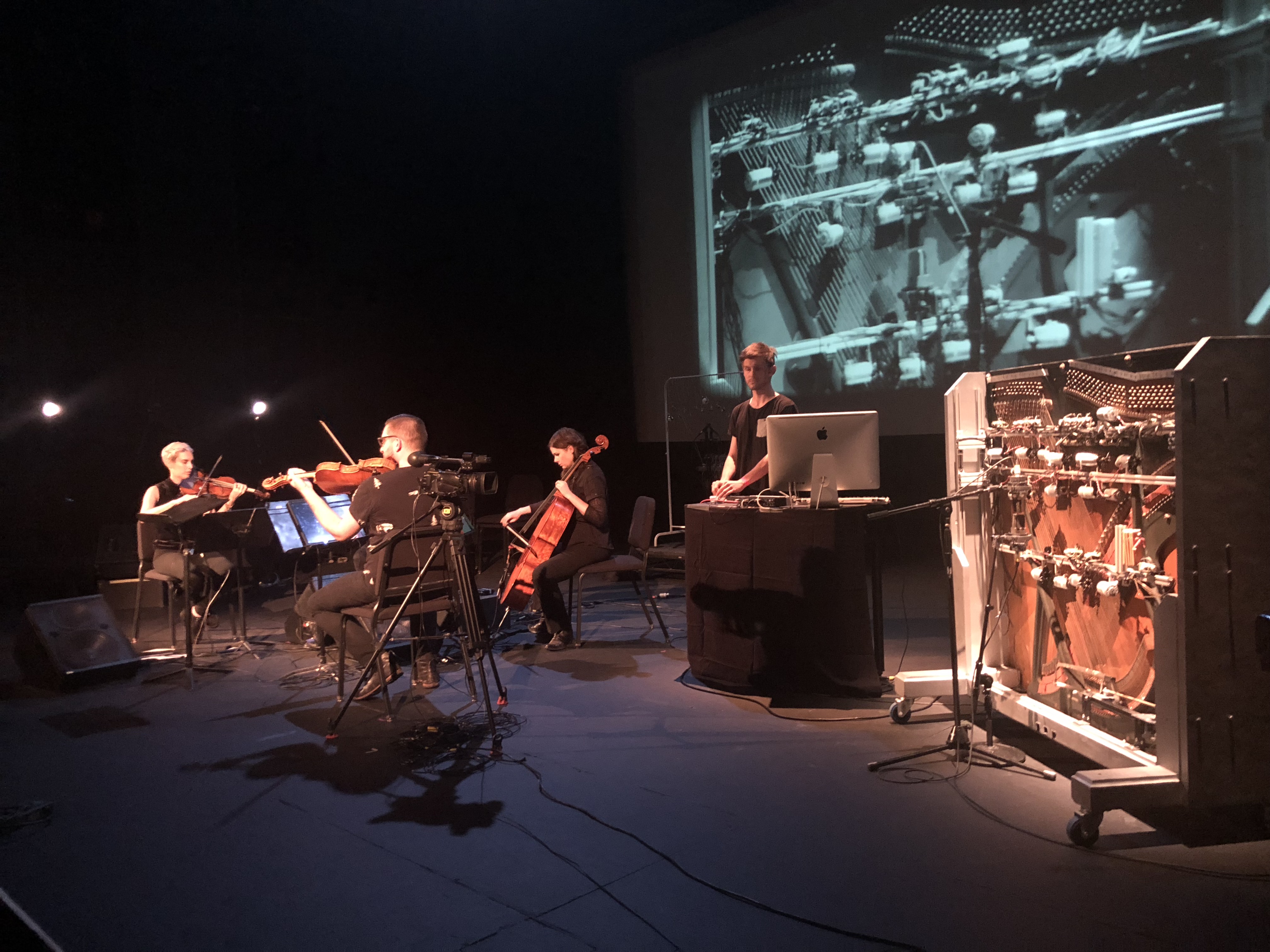
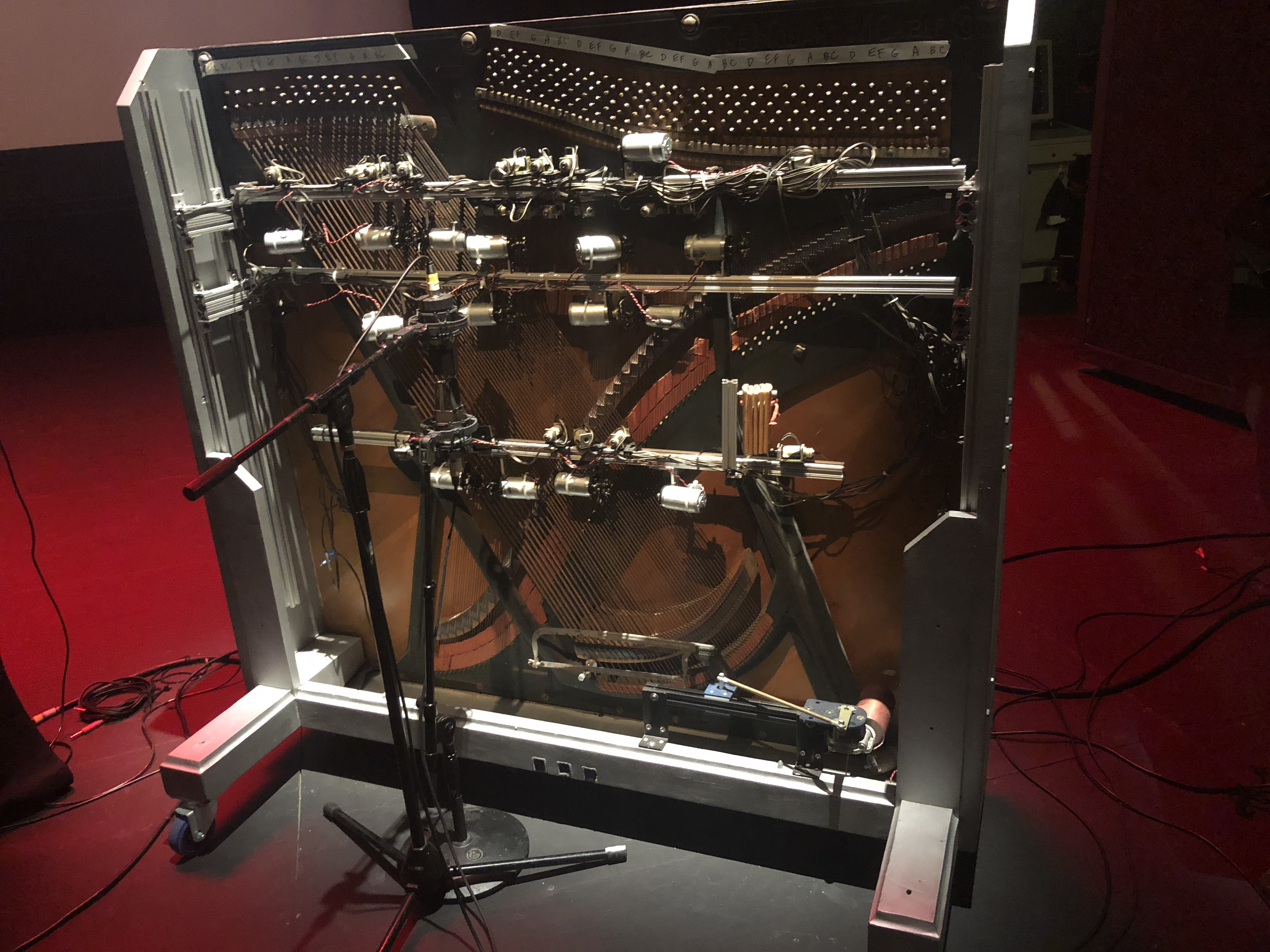
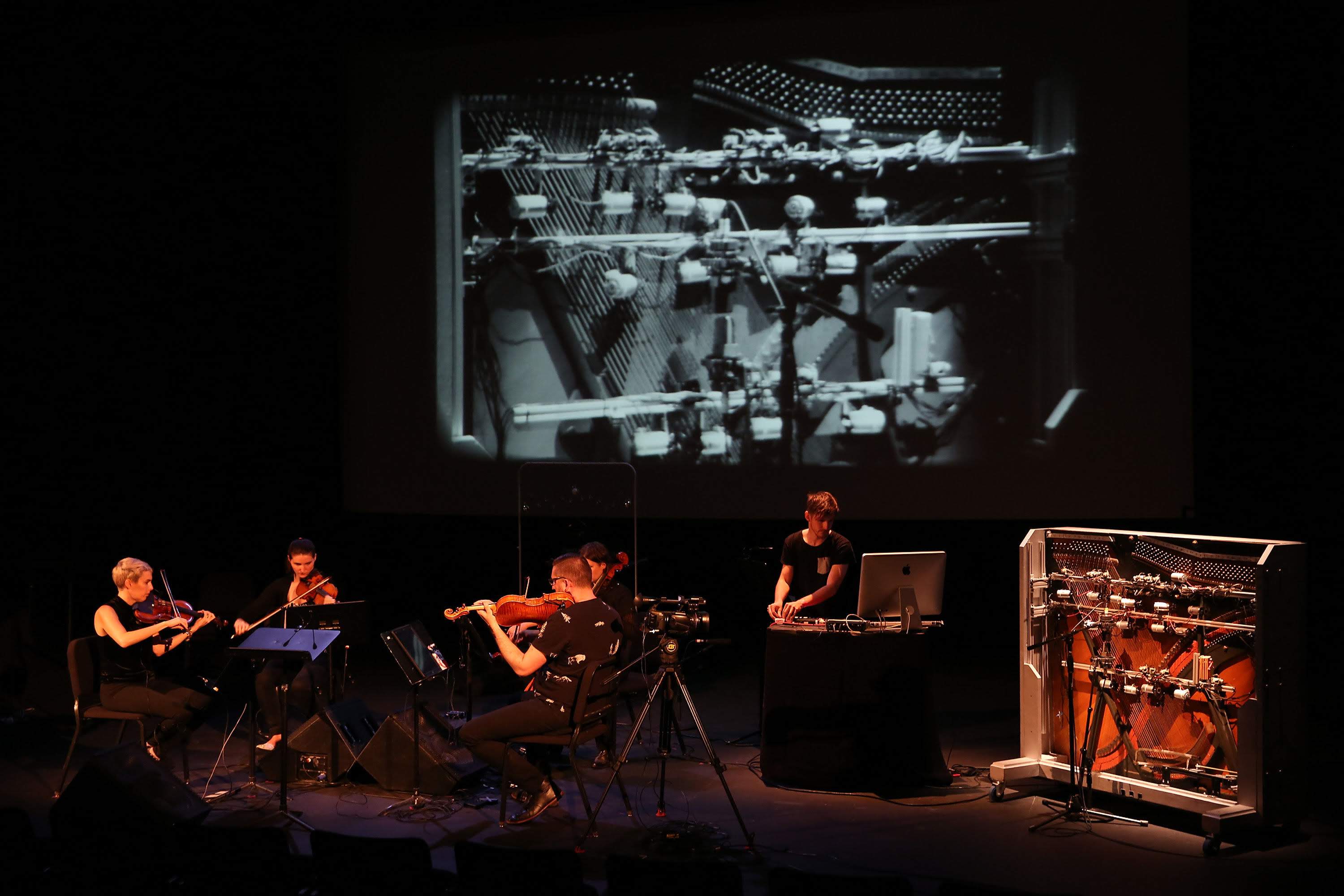
Rasper is a mechatronic sound-sculpture in which mechatronics and microcontroller programming are used to create rhythmically-ordered noise.
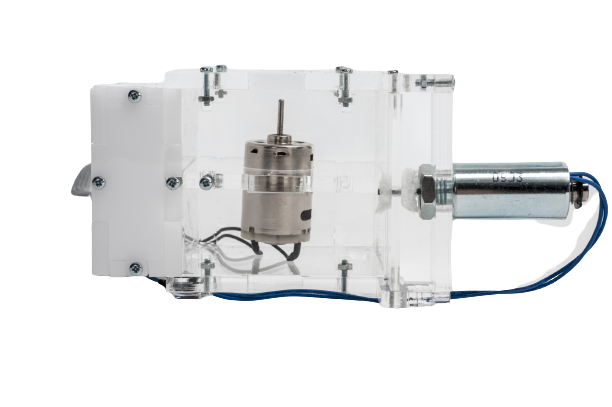
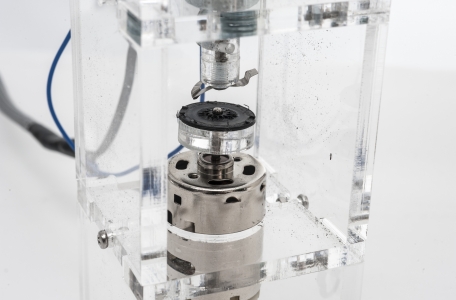
The instrument is comprised of a DC motor, a push solenoid, a 3D-printed plastic disk, a piece of sharp-edged spring steel, and an LED strip. These components are all held together in an open-faced enclosure made of clear acrylic. The noise is generated when the spring steel makes contact with the spinning 3D-printed disk that is attached to the DC motor: as the solenoid pushes out and the sharp tip of the bent spring steel touches the spinning disk, it vibrates rapidly and generates a high frequency rasping sound. A 12V push solenoid is used to switch the contact between the spring steel and the spinning disk on and off. Therefore, system’s rhythmic behavior – simple or sophisticated patterns, pulses, and pauses – is determined by solenoid movements. The amount of force applied by the solenoid is the main factor in determining the amplitude of each event, and modulation in the speed of rotation creates a timbral range and introduces a subtle and relative sense of variety to the pitch domain. The disk’s revolutions are actuated by the rotary motion of the motor shaft, and the LED strip lights up the entire unit once there is an event (a contact between the spring steel and the disk). The luminosity of the LED strip corresponds to the loudness of each event. The solenoid, the motor, and the LED strip are all controlled via a microcontroller (an Arduino board), driven by a custom-designed PCB board that functions as an Arduino shield.
Mo Zareei
Mentors: Ajay Kapur , Dale Carnegie
2014