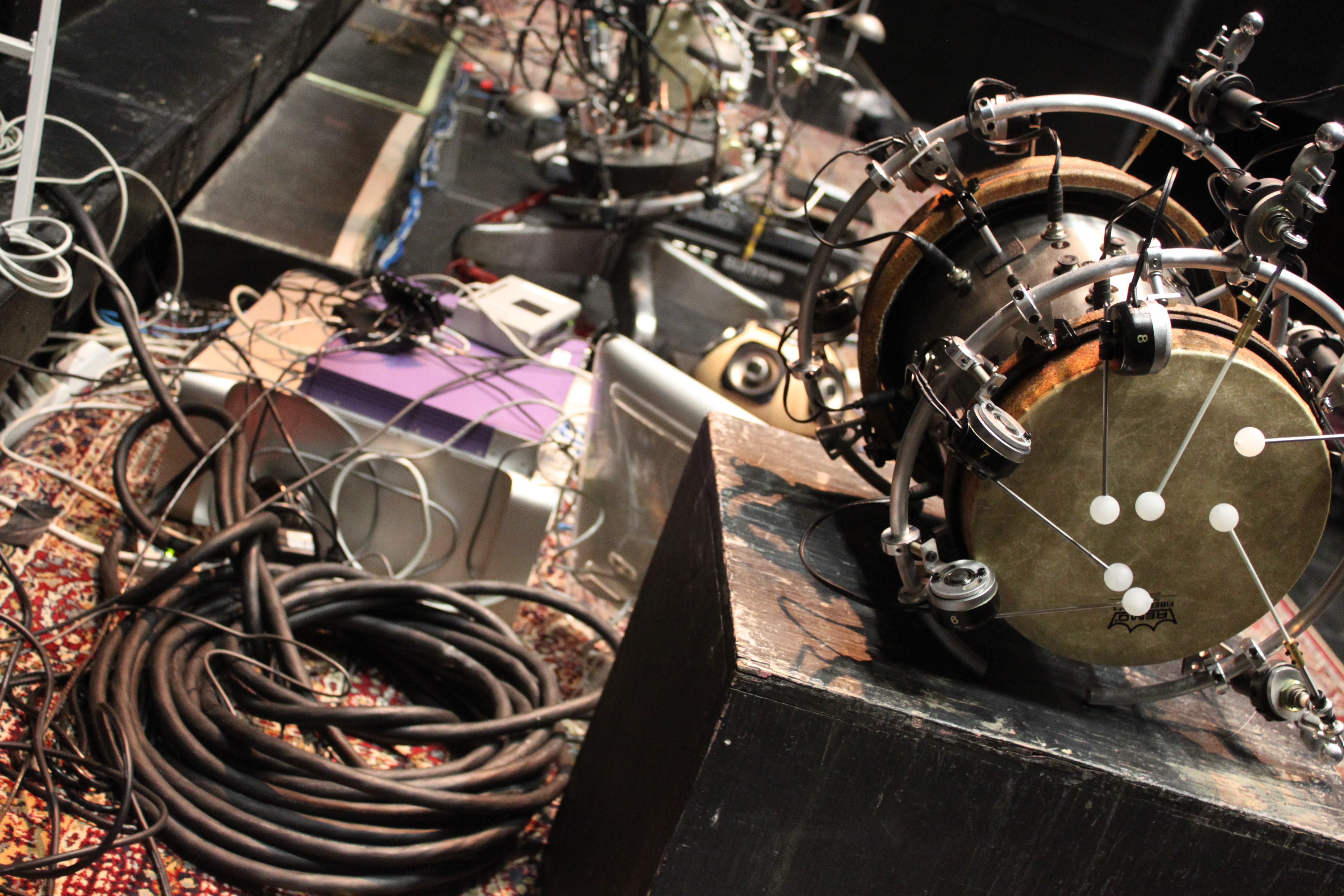
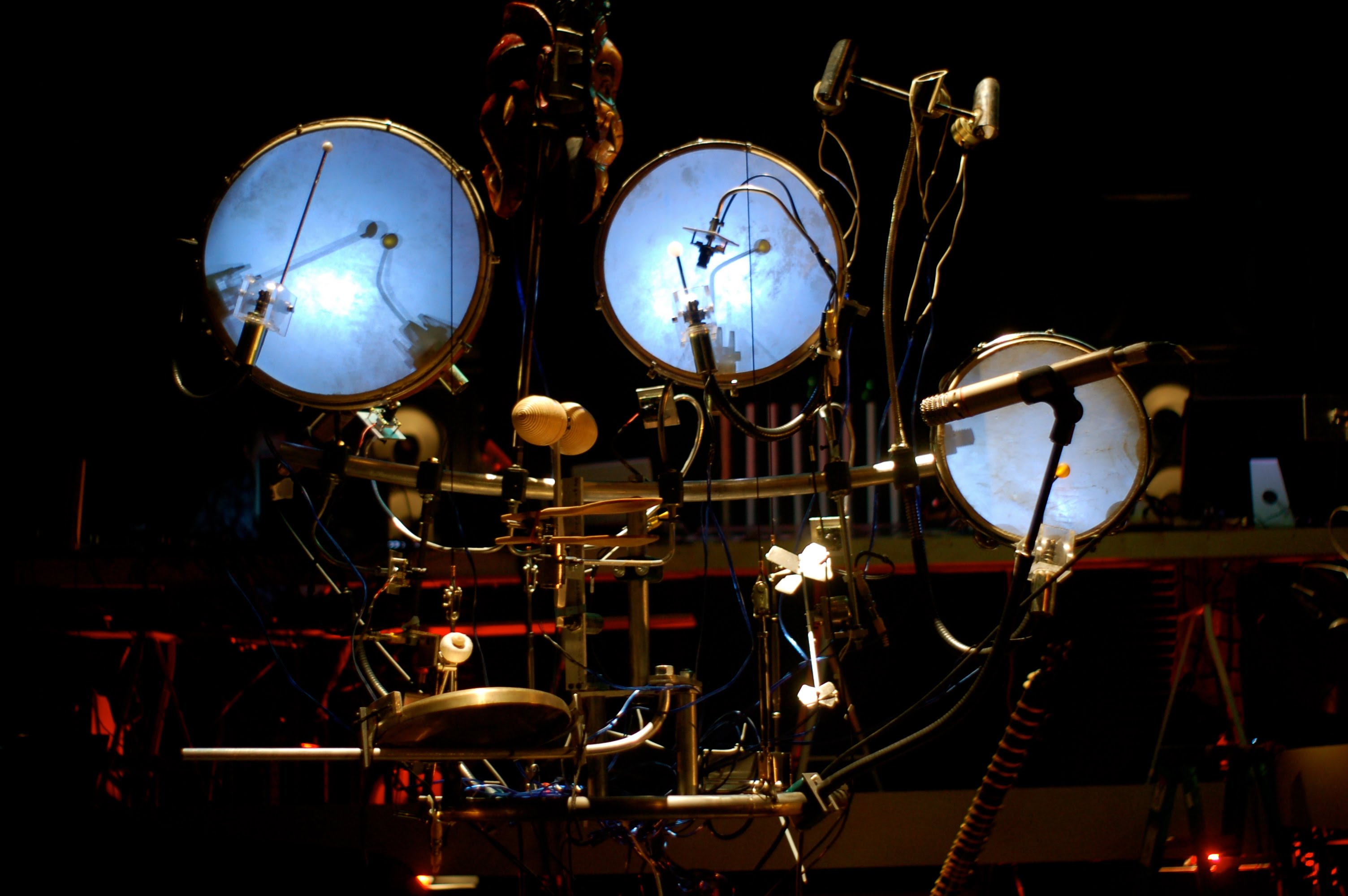
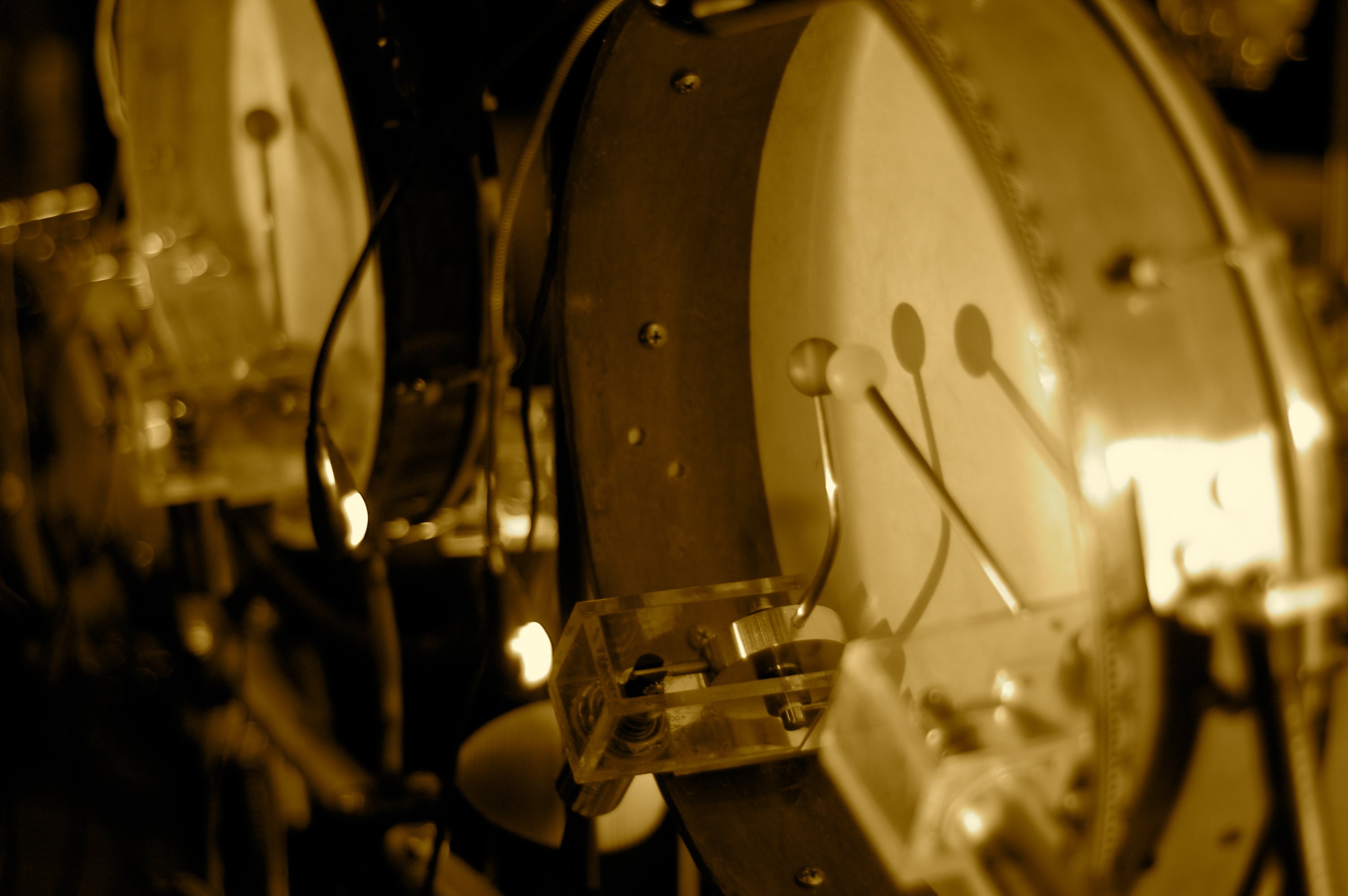
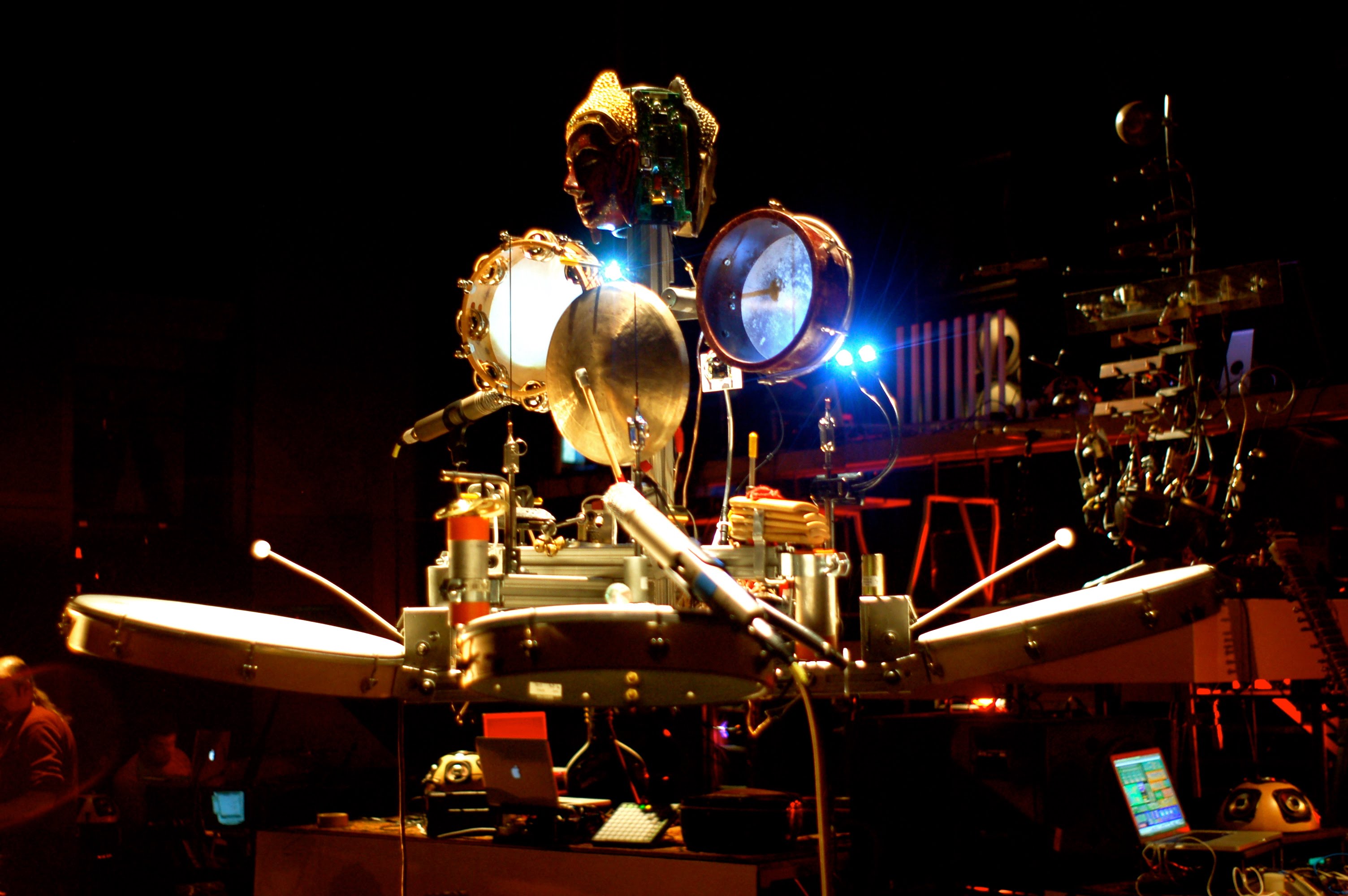
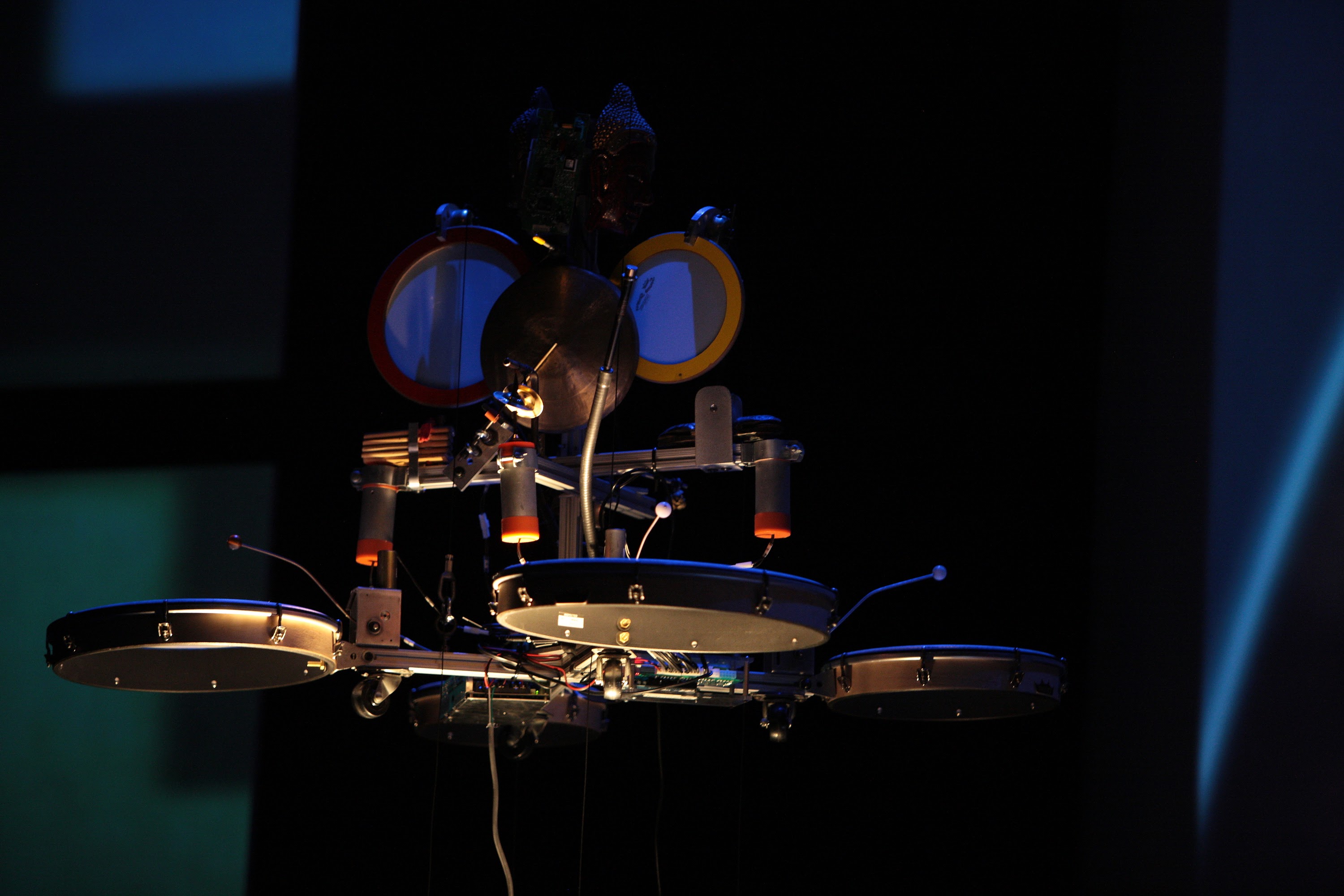
BreakBot consists of four subassemblies: a hi-hat, a kick drum, a snare, and a crash cymbal. Each of the four drum kit components has an assortment of actuators to strike and, in some cases, dampen or brush the drums. BreakBot’s hi-hat has two actuators: a linear solenoid connected to a drum stick which serves as a striker and a second solenoid connected to a padded rotary arm which functions as a damper. The damper can be actuated after striking the hi-hat to create a closed hi-hat sound. BreakBot’s crash cymbal behaves similarly, substituting the damper for a second padded beater: the beaters can be actuated quickly to create cymbal washes. The kick drum has two particularly powerful solenoid beaters attached to rotary arms. Each striker hits a different side of the kick drum and can be fired sequentially to allow for for aggressive double bass-style rolls. BreakBot’s snare has four actuators: two solenoids and a DC motor. Two solenoids are connected to a standard drumsticks which can be manually positioned to strike the drum head or rim at different points. The second solenoid raises and lowers a brush. The brush is connected to a DC motor on a crank mechanism which can be rotated with MIDI signals to move the brush across the drumhead, creating a brushed snare sound.
Ajay Kapur, Michael Darling, Meason Wiley, Ben Womick, John Aspinall, Roger Marcelo, Duncan Woodbury
2010